")
一��、技術性能
1、輸入電源:單相三線~220V±10% 50Hz
2�、工作環境:溫度-10℃~+40℃ 相對濕度≤85%(25℃) 海拔<4000m
3����、裝置容量:<1.5kVA
4、實訓平臺尺寸:2300mm×1200mm×800mm����,各部件采用優質鋁合金和不銹鋼機加工成型�����,精度高����,外觀無劃痕等。
5�����、控制柜尺寸(機器人):540mm×410mm×800mm
6���、安全保護:具有漏電保護����,安全符合國家標準
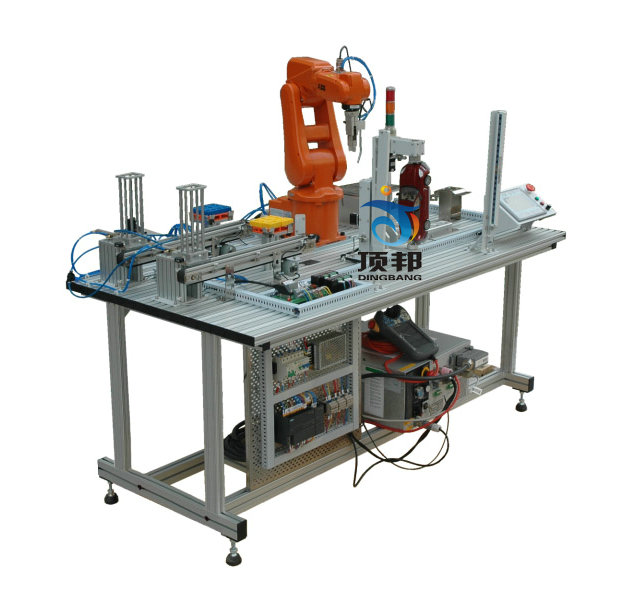
二�����、設備結構與組成
智能工業機器人實訓平臺采用ABB六自由度工業機器人系統、傳送系統�、可編程控制器(PLC)系統、視覺檢驗系統���、分揀系統、供料單元���、加工系統�、裝配系統����、倉庫單元、各類工件����、電氣控制柜、型材實訓桌����、型材電腦桌等組成���。
1��、六軸機器人(ABB)
6軸控制機械手:重量不大于25kg��,最高荷重3kg,工作范圍達580mm���,能通過柔性(非剛性)自動化解決方案執行一系列作業����,重復定位精度:0.01 mm���,軸1旋轉:工作范圍+165°~ -165°�����,軸2手臂+110°~ -110°��,軸3手臂+70°~ -90°�����,軸4手腕+160°~ -160°,軸5彎曲+120°~ -120°���,軸6翻轉+400°~ -400°。機器人高度:700 mm����,機器人底座尺寸:180×180 mm?��?删蜋C器人使用壽命內,使用機器人離線軟件進行實時程序�,IO,機器人3D動態動作監控。遠程機器人系統備份與恢復功能��,自動工具重量與載荷檢測設定功能�,在示教器實現人機互動界面的開發����,并提供基于VB和C#的二次開發功能,機器人全壽命保養自動維護檢測系統功能�,機器人運動軌跡實時微調功能���,自帶IO自定義可編程按鈕��,3D實時舒適搖桿手動操作系統�����,電池電量環保節省功能,終身機器人系統功能升級(高級用戶)�����,支持RAPID編程語言規范��,并直接解釋執行,支持ROBOTAPPS的開發���,機器人控制系統軟件必須基于WINCE平臺,機器人控制系統原配固態存儲器容量不得低于1G�����,并支持USB擴展為副存儲器��,機器人控制系統必須支持運行ROBOTWARE6.0以上的版本�����。
IRC5機械手控制柜:尺寸258*450*580mm���,單相220V供電,控制軟件RAPID,緊湊型����,防護等級IP20
機器人示教器:重量1KG��,彩色圖形界面觸摸屏��,操作桿和緊急停止按鈕�,左右手操作支持,USB儲存器支持�����。
配套:RW機器人操作系統���,機器人與控制電纜7米,示教器與機器人電纜10米�,機器人操作系統,碰撞檢測軟件����,主從通信模塊�����,16進16出數字輸入輸出板���。
")
(參考圖)
2、可編程控制器單元
配備可編程控制器��、數字量擴展模塊、以太網通信模塊等���,用于讀寫RFID系統的工件數據�,控制機器人�����、電機�、氣缸等執行機構動作���,處理各單元檢測信號����、數據傳輸等任務�。
3��、工位供料單元
模塊尺寸400*400mm���,由光電傳感器�、推料缸燈組成����,具有出料工位提供物料,使得實驗具有觀賞性����。
4���、輸送單元
模塊尺寸1100*770mm�,由直線執行器及搬運機械手組成���,由多種氣缸組成的機械手負責工件的抓取及擺放。直線執行器由伺服電機及同步帶組成��,負責帶動機械手精確移動����,從而實現將工件在各單元之間的精確搬運?��?蛇\動與不少于二個方向。
5��、工件模擬加工單元
模塊尺寸400*400mm,由旋轉缸��、加工缸及漸變彩燈等組成���,系統需配有加工系統,有制作工藝的標準流程����。加工時因具有加工提示。
6�����、裝配單元
模塊尺寸400*400mm�����,由旋轉缸�����、加工缸及漸變彩燈等組成��,需要有物料裝配過程���,能與原物料結合����。裝配時因具有裝配提示。
7��、視覺檢測系統
模塊尺寸780*300mm�����,配備傳送帶��、視覺相機�����、光纖傳感器����、4軸機械手等����,可識別物料的顏色及分辨產品是否合格,最后傳送物料到分揀單元�����。
8���、分揀單元
模塊尺寸770*400mm���,主要由鋁合金型材基體����、推料缸、光電傳感器��、顏色傳感器�、接近開關、光纖傳感器等組成�。采用單相電機完成運輸功能��,通過傳感器���,運輸中通過PLC的運算對物料進行分揀工作����。完成對毛坯件材質、顏色��、高度的檢測并將不合格工件檢出���。
9����、倉庫單元
模塊尺寸320*220mm,將分揀好的材料完成碼垛存儲的功能�。
")
10���、機器人電氣控制柜
用于安裝機器人控制器�、PLC�����、變頻器及調速控制器等電氣部件�,采用網孔板的結構,便于器件拆裝��、電氣布局�����,增加了設備的實訓性能��。通過航空電纜線與型材實訓桌相連�����,強弱電分離�����,連接安全可靠���。
11、視覺識別系統
視覺識別機構由識別攝像頭(要求靈敏度1.8V/lux-sec@550nm��,分辨率2048×1536��,光譜響應400nm~1000nm��,幀率15fps @ 1600 x 1200/30 fps @ 800 x 600)���、茶色亞克力遮光罩�、LED補充光源等組成����,配套視覺識別軟件,對物料進行檢驗是否合格���。
12��、現代PLC電氣先進控制云平臺
本平臺將物聯網技術運用于將PLC信息并將數據上傳至云平臺�����,進行海量數據存儲����,并提供豐富的數據分析工具方便更加準確的掌握數據與分析數據。需現場演示�,本平臺可實現以下幾個功能: 數據云系統上傳,手機app數據查詢����,歷史數據查詢,數據分析統計����,微信反向控制。
機器人控制原理系統平臺:
(1)采用DS28335作為主芯片設計��,3.5KW工業級驅動模塊�����,配置制動器�����,位置傳感器����,伺服電機,具有轉速控制��,位置控制�,采用LABVIEW等語言作為上位機控制系統,采用7寸彩色觸摸屏顯示����,支持高級語言MATLAB開發平臺���,用戶無需C語言及硬件知識���,可專注算法研究����。
(2)����、A/D和D/A通道:除DSP本身所帶的A/D通道外,還需額外擴展4路以上12位的D/A轉換通道��,可編程生成任意波形����,輸出電壓范圍最大為±10V��。3)���、外擴I/O:除DSP本身的I/O口外�,需擴展多路光耦隔離輸出口(6路以上)���、多路光耦隔離輸入口(6路以上)
(3)����、人機界面:采用7寸以上彩色觸摸屏���,顯示電機實時轉速、頻率��,當前的日期���、時間等�����。提供人機交換界面及上位機軟件��,實現啟動���、停止、頻率調節���、給定轉速調節���、PID調節等控制;同時上位機可實時觀測電流�����、速度反饋等�。
(4)、上位機軟件:通過上位機可以實現啟動�、停止、頻率調節���、給定轉速調節、PID參數設定等功能�����;同時可實時觀測電流���、速度反饋等波形。
(5)�、通信接口:1個CAN接口���,1個USB接口,1個10M/100M以太網接口�����,方便用戶擴展���。
(6)、功率模塊:采用IPM模塊�,最大輸出功率3.5kW。
(7)���、保護功能:具有過壓�����、過流與過熱保護功能,當保護發生時立刻封鎖PWM脈沖輸出�����。
(8)、能提供源代碼供學生實驗時進行程序修改調試��,并提供相關的實驗指導書�。開放部分PWM接口(6路以上)、I/O口����、CAP口、AD���、DA 等等外圍電路接口,供不同實驗擴展使用��,即DSP板應該為開放可二次開發板���。利用DSP仿真器將不同的控制算法下載到DSP芯片中����,各種標準接口(SCI����、JTAG等),顯示模塊��,捕獲脈沖產生單元��,光碼信號處理單元����,電源�����,電機控制單元��,電機驅動芯片以等����,支持多種電機控制,支持24V系統和高壓系統����。
14.3D仿真系統:本系統采用三維設計,仿真度高�����,與設備1:1配套�,全零件拆裝,接線�,程序運行仿真等,提供照片及實驗(含各設備的聯調)的演示����,具有相關的原理圖。
三��、實驗所需完成的實驗項目
項目一 PLC程序編程與調試
項目二 工業機器人示教單元使用
項目三 工業機器人軟件使用
項目四 工業機器人基本指令操作
項目五 工業機器人工件的跟蹤抓取
項目六 工業機器人的動作編程應用
項目七����、材料分揀的編程應用
項目八�����、整個系統的編程與應用
項目九�、機器視覺識別系統
項目十�����、機器人控制系統原理底層開發


")
")
")
")
")
")
")