一��、簡介
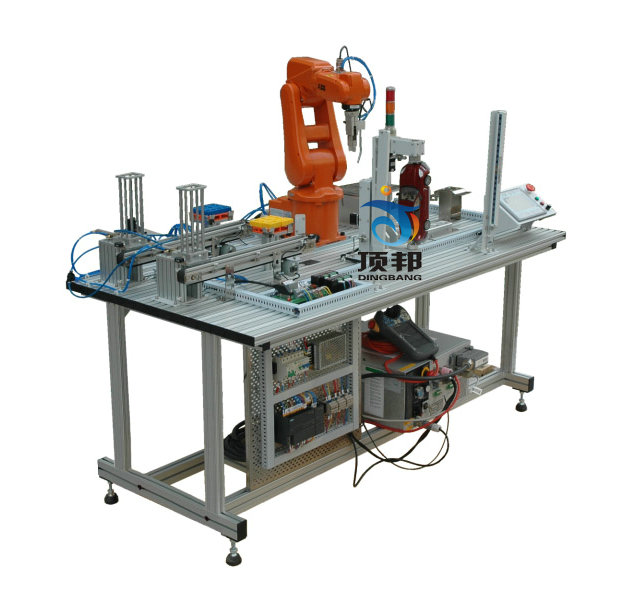
工業機器人拆裝實訓裝置學生可以通過其學習機器人電氣關鍵零部件的工作原理,掌握常用工業機器人的機械結構裝配方法����,包括本體�、減速機�����、電機及其本體線束的裝配����。通過實訓后學生能基本形成工業機器人的結構理論體系�。常用電氣件(開關/按鈕/斷路器/接觸器)工作原理�、電氣接線圖識圖、電氣接線�����、機器人控制系統故障排除���、機器人示教程序和用戶PLC程序設計等技能�。
二�、主要功能
1、機械方向:工業機器人電氣系統拆裝實訓平臺集成六軸機器人拆裝工程模塊�,通過該工作站學生可基本掌握常用工業機器人的機械結構裝配方法,包括本體����、減速機�����、電機及其本體線束的裝配���。通過實訓后學生能基本形成工業機器人的結構理論體系,在工業機器人領域的進一步學習和發展奠定扎實基礎����。
2���、電氣方向:工業機器人電氣系統拆裝實訓平臺主要把機器人IPC控制器�、IO模塊��、交流伺服驅動器�����、示教器��、伺服電機等電氣核心零部件集成到平臺來進行展示與教學�。學習機器人電氣關鍵零部件的工作原理�����、常用電氣件(開關/按鈕/斷路器/接觸器)工作原理����、電氣接線圖識圖���、電氣接線����、機器人控制系統故障排除�����、機器人示教程序和用戶PLC程序設計等技能�。
三���、配置清單
| 序號 | 產品名稱 | 規格參數 |
| 1 | 輕量化拆裝機器人 | 手腕負載:額定3kg最大4kg
最大工作半徑:540mm
自由度:6
關節速度:
J1 370°/s
J2 370°/s
J3 430°/s
J4 300°/s
J5 460°/s
J6 600°/s
關節范圍:
J1±170°
J2±110°
J3+40°/220°
J4±185°
J5±125°
J6±360°
重量:≤25kg
工作溫度:0-40℃
本體全透明化設計�,可直接觀察到內部各個部件的運動過程及原理。 |
| 2 | 拆裝實訓臺 | 防靜電拆裝一體化實訓臺主體由鋁型材焊接而成�����,兩側安裝噴塑鋼板��,下方配置推拉式抽屜�,用于放置機器人拆裝工具,整體結構牢固美觀�����,便于機器人的拆裝維護及示教編程作業�����。防靜電拆裝一體化實訓臺尺寸:≥1250*1000*820 mm���。 |
| 3 | 機器人控制系統 | 采用EtherCAT總線技術,兼容IEC61131-3標準�����,支持各類EtherCAT模塊;基于X86 IPC+RTOS設計��,支持六關節自由度機器人�����、SCARA機器人�、五軸機器人��、連桿碼垛機機器人�����、四軸多關節機器人�、DELTA機器人��、直角坐標機器人����、多軸專用機器人等多種機器人的控制。
自帶上下料、碼垛���、焊接、焊縫跟蹤����、視覺����、激光切割���、傳送帶跟蹤��、碰撞檢測��、拖拽示教等多種通用工藝,并可根據用戶需求進行定制�����;同時提供完整API接口�,用戶可根據需求高效、方便地自主開發專用工藝(PApp)與專用工藝界面(PUI)。
控制器:處理器:X86 4核 2.0G 內存:4G 存儲空間:16/32G
控制軸數:標準:6軸垂直關節機器人 可選配:1軸地軌��、2軸輔助軸變位機����、3軸龍門架
控制伺服:EtherCAT,Sercos III,CANopen,TSN
接口:數字I/C接口����,16路輸入/16位輸出(可擴展)
4路-10~+10V模擬量輸出,12位精度(選配���,可擴展)
8路-5~+5或0~10V模擬量采集,12位精度(選配���,可擴展)
機器人專用端子接口,防碰撞���、電機報閘���,報警控制等
操作模式:示教模式、離線編程��、遠程模式
編程方式:示教編程��、離線編程�、拖動示教
運動功能:點到點、圓弧����、樣條曲線、直線橫擺�����、軌跡平滑
指令系統:運動指令��、邏輯指令�����、輸入輸出指令�����、運算指令
位置控制方式:點到點控制��、連續軌跡控制
坐標系統:關節坐標系、機器人坐標系���、工具坐標系、用戶坐標系
結構算法:4軸SCARA 4軸沖壓機械手 6軸垂直多關節 4軸連桿碼垛 4軸直角坐標機器人 客制化專用機器人
應用:裝配��、點膠�、焊接、噴涂�����、碼垛��、切割��、拋光打磨��、搬運等
電源:24V 60W(控制器功率30W,示教盒30W) |
| 4 | 工業機器人快換組件 | 外形尺寸(長×寬×高) 300*300*200 mm
工位數量 2個
鋁材支架主要由鋁型材搭建而成��,其表面配套定位裝置����。工件放置在實驗支架的定位裝置中,機器人示教再現進行樣件的搬運作業��。鋁材支架上面固定四處尖針����,以便進行TCP標定驗證。
機器人末端配置氣動手爪工具��,用于夾取樣件進行搬運���、裝配、編程���、實操等實訓作業���。 |
| 5 | 碼垛模塊 | 外形尺寸
(長×寬×高) 300*300*60 mm
安裝形式 適配標準實訓臺定位安裝
零件容量 矩形工件15個。 |
| 6 | 裝配模塊 | 外形尺寸:(長×寬×高)300*300*178mm
安裝形式 適配標準實訓臺定位安裝
可容納零件個數18個
排列形式 3行6列
裝配模塊設置有裝配順序����,可拓展RFID功能�。 |
| 7 | 立體倉庫模塊 | 外形尺寸(長×寬×高) 300*300*420 mm
安裝形式 適配標準實訓臺定位安裝
倉儲容量 6
兼容工件種類 2種 |
四、實訓項目
1����、工業機器人基本操作與示教編程
2�����、工業機器人本體拆卸工藝認知
3�、工業機器人本體裝配工藝認知
4、工業機器人關鍵零部件的基本結構認知
5�����、工業機器人裝配精度測試和調整
6�、工業機器人控制系統調試和維修
7、工業機器人電氣接線工具認識與使用
8��、工業機器人關鍵零部件及電氣元器件認知
9�、機器人控制系統參數設置
10��、機器人電控系統電氣系統故障排查和維護


")
")