(西門子ABB系統)
")
一、概述
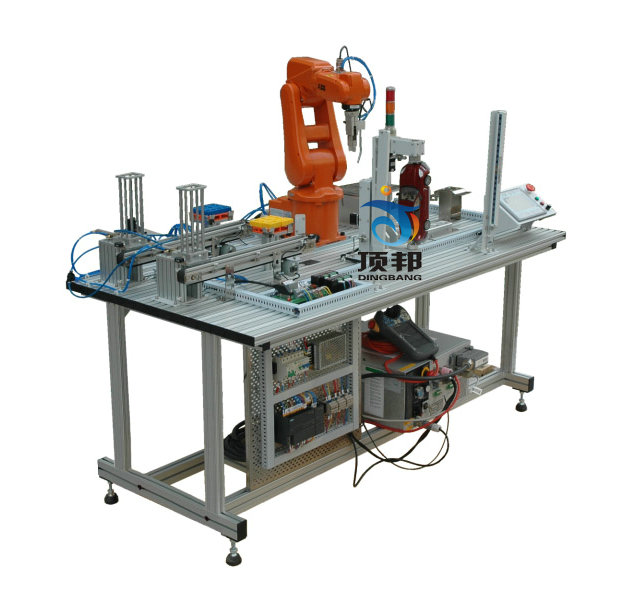
“工業4.0柔性自動化生產實訓系統”是由六臺各自獨立而又緊密相連的工作站組成���。是一種最為典型的機電一體化、自動化類產品,適合機械制造及其自動化、機電一體化���、電氣工程及自動化、控制工程��、測控技術�����、計算機控制�����、自動控制等相關專業的教學和培訓�����。它接近工業生產制造現場基礎上又針對實訓教學進行了專門設計���,強化了各種控制和工程實踐能力���。
工業4.0柔性自動化生產實訓系統由六個站組成�,分別為:供料單元����,加工單元�����,搬運單元,裝配單元���,機器人搬運單元�����,倉儲單元,運輸軸單元,觸摸屏監控單元,工件檢測單元等���,控制系統可以選用品牌的PLC進行控制,具有較好的柔性�����,即每站各有一套PLC控制系統獨立控制��,在單個培訓完成以后��,又可以將相鄰的兩站���、三站…直至所有站連在一起��,學習復雜系統的設計、安裝���、編程���、調試和整機運行。
二��、技術指標:
1�����、輸入電源:單相三線~220V±10% 50Hz
2�、工作環境:溫度-10℃~+40℃ 相對濕度≤85%(25℃) 海拔<4000m
3、裝置容量:<2.5kVA
4���、實訓平臺尺寸不小于:4500mm×785mm×1100mm,各部件采用優質鋁合金和不銹鋼機加工成型�����,外觀無劃痕等���。
5、單站工作臺尺寸不小于:750mm×785mm×1100mm
三���、系統組成
(一)供料單元
")
供料單元負責3種不同材料的供料���,由料管、推料裝置及傳輸線等組成。具有 3D 仿真運行環境��,軟件模型與本次采購實物一比一繪制,可通過滿足要求的 PLC 仿真軟件進行在線編程��、虛擬調試�����、實時監控等線上操作。
主要技術參數要求及電氣元件:
1���、工作臺:鋁合金�����。
2�、供電電源/工作電壓:AC220V 50Hz /DC24V 2A�。
3���、工作氣壓:0.5MPa
4����、PLC 模塊 1(CPU1214C DC/DC/DC):8 輸入/6 輸出���,集成 2AI;主要基本單元采用 24VDC 供電�,集成PROFINET 接口�,自帶脈沖輸出 100kHz,配套滿足參數要求的 PLC 編程軟件���。
5�����、直流減速電機: 10W/24V 5r/m
6、檢測傳感器:光電漫反射����、磁感式接近開關、光纖放大器等�。
7�����、電源控制盒:尺寸600mm×100mm×100mm���,面板上設有總急停按鈕���、斷路器帶保險絲、指示燈�、鑰匙開關�、啟動���、停止以及急停按鈕�����,整體設計成獨立模塊�,外殼采用專用C型鋁合金型材�����,兩端采用鈑金件固定。
(二)加工單元
")
加工單元由傳輸線�、加工站、轉盤機構等組成�����。完成物料加工、檢測及輸送等功能��。
1、工作臺:鋁合金
2���、供電電源/工作電壓:AC220V 50Hz /DC24V 2A
3、工作氣壓:0.5MPa
4�����、PLC 模塊 1(CPU1214C DC/DC/DC):8 輸入/6 輸出����,集成 2AI;主要基本單元采用 24VDC 供電����,集成PROFINET 接口���,自帶脈沖輸出 100kHz�,配套滿足參數要求的 PLC 編程軟件����。
5�、檢測傳感器:光電漫反射����、磁感式接近開關��、光纖放大器等����。
6、具有 3D 仿真運行環境��,軟件模型與本次采購實物一比一繪制���,可通過滿足要求的 PLC 仿真軟件進行在線編程���、虛擬調試、實時監控等線上操作���。
(三)搬運單元
")
搬運站是接駁上一站的物料放置傳輸線進行下一站的供料,由物料平臺、氣缸機械手���、傳輸線等機構組成��。
氣缸規格量程:旋轉氣缸:0~180°�����,雙聯氣缸:行程:100mm,平行氣夾:缸徑:16mm�����,不回轉氣缸:行程:100mm�����,檢測傳感器:磁感式��。
1�、工作臺:鋁合金
2、供電電源/工作電壓:AC220V 50Hz /DC24V 2A�;
3、工作氣壓:0.5MPa
4���、PLC 模塊 1(CPU1214C DC/DC/DC):8 輸入/6 輸出�����,集成 2AI;主要基本單元采用 24VDC 供電��,集成PROFINET 接口,自帶脈沖輸出 100kHz,配套滿足參數要求的 PLC 編程軟件���。
5��、檢測傳感器:光電漫反射、磁感式接近開關、光纖放大器等�。
6���、具有 3D 仿真運行環境,軟件模型與本次采購實物一比一繪制����,可通過滿足要求的 PLC 仿真軟件進行在線編程�����、虛擬調試�、實時監控等線上操作�。
(四)裝配單元
")
裝配站由滑槽式送料模塊���、氣缸機械手、傳輸線等機構組成����,完成兩個物料的裝配��。
1、工作臺:鋁合金
2��、供電電源/工作電壓:AC220V 50Hz /DC24V 2A 工作氣壓:0.5MPa
3、PLC 模塊 1(CPU1214C DC/DC/DC):8 輸入/6 輸出��,集成 2AI�����;主要基本單元采用 24VDC 供電�����,集成PROFINET 接口���,自帶脈沖輸出 100kHz���,配套滿足參數要求的 PLC 編程軟件��。
4�、檢測傳感器:光電漫反射���、磁感式接近開關����、光纖放大器等
5�����、具有 3D 仿真運行環境��,軟件模型與本次采購實物一比一繪制�,可通過滿足要求的 PLC 仿真軟件進行在線編程、虛擬調試��、實時監控等線上操作��。
(五)機器人搬運單元
")
1���、ABB工業機器人����,單臺配置如下:
▲機器人本體,臂展0.60m以上�����,有效負載3公斤;緊湊
型控制器;機器人本體到控制器之間的電纜長度7米;示教盤附帶10米電纜,具中文操作界面;數字式直流24V 16進/16出,輸入�、輸出信號板;機器人控制軟件;機器人資料。
模式:關節型�����;控制軸數:6軸;
| 可達半徑(MM) | 550 |
| 安裝方式 | 地面安裝�����、頂吊安裝、傾斜角安裝 |
| 手腕允許負載轉矩 | J4 | 8.86Nm |
| J5 | 8.86Nm |
| J6 | 4.9Nm |
| 手腕允許負載轉動慣量 | J4 | 0 .20kg x m? |
| J5 | 0 .20 kg x m? |
| J6 | 0 .067 kg x m?/ |
| 運行角度/速度 | J1 | +/- 340°(可選360°)(460°/s) |
| J2 | +/- 230°(460°/s) |
| J3 | +/- 402°(520°/s) |
| J4 | +/- 380°(560°/s) |
| J5 | +/- 240°(560°/s) |
| J6 | +/- 720°(900°/s) |
| 手腕部可搬運質量 | 4KG |
| 重復定位精度 | +/-0.02mm |
| 本體重量 | 20kg |
2���、仿真軟件:具有 3D 仿真運行環境,軟件模型與本次采購實物一比一繪制����,可通過滿足要求的 PLC 仿真軟件進行在線編程�、虛擬調試��、實時監控等線上操作。(投標現場演示�,不演示或者演示不符合的視為負偏離)
3����、PLC 模塊 1(CPU1214C DC/DC/DC):8 輸入/6 輸出,集成 2AI�;主要基本單元采用 24VDC 供電����,集成PROFINET 接口,自帶脈沖輸出 100kHz�����,配套滿足參數要求的 PLC 編程軟件。
7�、變頻器:西門子V20變頻器 0.37kw��,SINAMICS V20 200-240 V 1 相交流 - 10/+ 10 標稱功率 0.75 kW/1 PS 有 60 秒 150 % 過載 未過濾 I/O 接口:4 DI,2 DO����, 2 AI��,1 AA 現場總線:USS/MODBUS RTU 安裝有 BOP 防護等級 IP20/UL 開放 尺寸:尺寸AB 68x142x128(寬x 深x高)
8����、檢測傳感器:光電漫反射、磁感式接近開關��、光纖放大器等�。
(六)倉儲單元
")
倉儲單元由堆垛機����、氣動手抓��、3*4立庫組成,完成成品工件的倉儲功能��。
1�����、工作臺:鋁合金材質
2、供電電源/工作電壓:AC220V 50Hz /DC24V 2A����;工作氣壓:0.5MPa
3��、PLC 模塊CPU1214C DC/DC/DC:14 輸入/10 輸出����,集成 2AI��;主要基本單元采用 24VDC 供電,集成 PROFINET 接口����,數字量輸入:額定輸入電壓 DC24V�,輸入點數 14����,輸出點數 10�,自帶脈沖輸出 100kHz��,模擬量輸入:精度 13 位,±10V�����,阻抗≥9MΩ�����,0-20mA,阻抗 250Ω��,輸入路數 2。配套滿足參數要求的 PLC 編程軟件�����。
4���、擴展模塊(SM1234):2x24VDC 輸入/2x24VDC 輸出
5、步進電機:1.5A 角距:1.8 度
6�、檢測傳感器:光電漫反射����、磁感式接近開關����、光纖放大器等。
7�����、具有 3D 仿真運行環境,軟件模型與本次采購實物一比一繪制�����,可通過滿足要求的 PLC 仿真軟件進行在線編程��、虛擬調試��、實時監控等線上操作。
(七)運輸單元
采用同步輪的方式進行傳送�����,單元可獨立運行��,各個單元站中的皮帶尺寸長度不小于 60*500mm�。運輸單元電機驅動測試系統:平臺尺寸 19×29cm�����,重量不大于 250g,含多電機驅動系統���,減速器變速比>1/36�,滿載電機轉速>3500rpm。
(八)觸摸屏監控單元
配有7寸彩色觸摸屏:
1�、800 X 480 分辨率�、65535 色 TFT����;
2�����、按照工業 III級標準生產��,采用 LED 背光永不黑屏���;
3、400M 主頻��、WinCE 系統��、MCGS 組態軟件��、64M 存儲空間�;
4�、支持 U盤備份���、恢復��,操作快捷����;
5�、支持 RS232/RS485/RJ45以太網通訊接口���;
6、低功耗�,整機功耗僅 6W�;
7�、配下載線和安裝軟件���;
8�、接口全部引出到專業端子排上。
9���、當 6 個單元全部進入聯網狀態時,管理員能夠通過組態監控機中各種組態按鈕方便的控制整個系統的運行����、停止等。每個單元的工作狀態以及工件的材質�����、顏色等在監控畫面上也能夠清楚的看到�����。
(十二)配套軟件
12.1、PLC仿真軟件:
1.可進行縮放����、拖動����、旋轉��、恢復視角相機模式切換。2.支持選配沉浸式VR頭盔連接��,漫游場景觀看和交互操作�。3.選配輸入輸出采集板卡����。供學生接線定義傳感器和執行機構的IO分配����。
4.支持在線連接真實PLC與觸摸屏���,進行編程調試。
★5.支持連接西門子PLC官方編程軟件(全集成自動化軟件TIA Portal V14+官方仿真器PLCSIM V14)實時互聯互通��,實現虛擬在線調試��。不需要真實PLC就可以實現程序的在線實時監控��、調試�����、下載�、上傳等功能?��?刹榭锤鞣N寄存器實時數據����。
★6.支持連接三菱品牌PLC:可以與對應官方編程軟件(GX Works2)實時互聯互通�����,實現虛擬在線調試�����。不需要真實PLC就可以實現程序的在線實時監控����、調試����、下載����、上傳等功能?���?刹榭锤鞣N寄存器實時數據���。
★7.支持連接歐姆龍PLC編程軟件CX-Programmer,可以與該官方編程軟件實時互聯互通���,實現虛擬在線調試。不需要真實PLC就可以實現程序的在線實時監控����、調試���、下載、上傳等功能�。可查看各種寄存器實時數據����。
★8.支持連接臺達plc編程軟件WPLSoft����,可以與該官方編程軟件實時互聯互通����,實現虛擬在線調試�����。不需要真實PLC就可以實現程序的在線實時監控、調試�、下載�����、上傳等功能?��?刹榭锤鞣N寄存器實時數據���。
★9.支持連接羅克韋爾PLC編程軟件(Rockwell RSlogix)�,可以與該官方編程軟件實時互聯互通�,實現虛擬在線調試。不需要真實PLC就可以實現程序的在線實時監控�、調試、下載�����、上傳等功能��??刹榭锤鞣N寄存器實時數據����。
★10.支持連接匯川plc編程軟件autoshop����,可以與該官方編程軟件實時互聯互通����,實現虛擬在線調試。不需要真實PLC就可以實現程序的在線實時監控�����、調試�����、下載���、上傳等功能。可查看各種寄存器實時數據�����。
11.支持各個部件的手動操作�����。包含各種傳感器 有光電�、光纖��、電容���、電感、磁性等���。每個傳感器都像真實傳感器那樣有感應區����,并且帶感應屬性。只有物料的屬性與傳感器的感應屬性一致才能被感應���。
12.包含各種執行機構有氣動機械手、傳送帶��、直流電機、交流電機等�。每個機構的動作與真實機構一樣且可以隨意編程定義動作的執行順序���。
13.物料和機構帶有各種物理屬性:重力,摩擦力�����,彈力���,空氣阻力�,角阻力等。
14.每種動作都可以支持手動操作:伸出�����,縮回�,下降���,上升,夾緊���,松開等等����。
15.支持物料自動生成,可按照位置���、種類隨機生成。支持清空復位���。
16.支持離線自動演示�����,在線自動運行,在線手動運行多種工作模式����。
17.▲支持虛擬觸摸屏人機界面與虛擬PLC的實時通訊調試�����,虛擬調試好的觸摸屏工程文件可以直接下載到真實觸摸屏�����,無需任何修改和調試,即可正常運行�。
18.可模擬真實物料的翻轉�,跌落�,擠壓�,碰撞等效果��。
19.傳感器輸出方式多樣化:開關量��,模擬量�����,脈沖量等�����。
20.支持單站式學習,每個模塊都可以單獨編程����,也可整體編程���。相當靈活。
21.支持添加傳感器����,修改傳感器���,刪除傳感器�����。
22.可以連接真實機構做監控模式,也可脫離真是機構做實訓模式��。
23.支持傳感器故障模擬����,機構故障模擬等���。
24.支持機構動作的調速控制,傳感器延時控制等�����。
25.支持虛擬平臺反向控制,可通過平臺操作PLC等�。
26.支持通訊控制,可以不用連線也能達到實訓編程的目的等�。
27.支持多種模式:數字孿生監控模式���、半實物仿真實訓模式、虛擬在線調試模式��、軟件在環模式�����、硬件在環模式等。
★28.虛擬在線調試模式可以和對應PLC品牌官方編程軟件的仿真器實時連接��,不需要真實PLC就可以實現程序的在線實時監控、調試��、下載�����、上傳等功能�。虛擬調試好的程序可直接下載到真實PLC運行,無需任何調度和修改��,即可正常運行�。
★29.虛擬三維對象與虛擬PLC實時互聯互通���,支持執行PLC所有指令,包括基本指令��、應用指令�����、高級指令。實現各種邏輯控制���、脈沖定位控制�����、模擬量輸出控制等。也可任意反饋PLC所需要的的各種傳感器信號��、開關量�、模擬量�、數字量��、脈沖量等輸入信號�。
26.虛擬調試就是虛擬現實技術在工業領域的應用,通過虛擬技術創建出物理制造環境的數字復制品�,以用于測試和驗證產品設計的合理性���。例如���,在計算機上模擬整個生產過程����,包括機器人和自動化設備��、PLC�、變頻器��、電機等單元。像機器人單元模型創建完成就可以在虛擬世界中進行測試和驗證�����。
★30.虛擬三維基礎實驗對象:刀庫捷徑選擇系統、自動成型裝配���、數碼管實驗��、自動洗衣機、自動機械手�����、裝配流水線、水塔水位控制���、郵件分揀控制����、電視發射塔���、自動送料小車、電機正反轉�����、自動交通燈、自動沖壓機�、電梯控制�����、自動售貨機等��。與實物模塊功能一致���。
12.2機器人VR仿真軟件:
▲1.支持機器人主流ABB品牌,能與該品牌機器人官方機器人編程軟件聯接����,實現控制虛擬控制對像。實現程序的在線實時監控�����、調試、示教�����。
▲2.支持機器人主流FANUC品牌,能與該品牌機器人官方機器人編程軟件聯接�,實現控制虛擬控制對像。實現程序的在線實時監控����、調試、示教。
▲3.支持機器人主流庫卡品牌,能與該品牌機器人官方機器人編程軟件聯接�����,實現控制虛擬控制對像。實現程序的在線實時監控、調試�����、示教����。
▲4.支持機器人主流三菱品牌,能與該品牌機器人官方機器人編程軟件聯接���,實現控制虛擬控制對像�。實現程序的在線實時監控�����、調試、示教�����。
▲5.支持機器人主流川琦品牌,能與該品牌機器人官方機器人編程軟件聯接���,實現控制虛擬控制對像。實現程序的在線實時監控��、調試���、示教��。
▲6.支持機器人主流EPSON品牌,能與該品牌機器人官方機器人編程軟件聯接,實現控制虛擬控制對像���。實現程序的在線實時監控、調試�����、示教���。
▲7.支持機器人主流YAMAHA品牌,能與該品牌機器人官方機器人編程軟件聯接�����,實現控制虛擬控制對像。實現程序的在線實時監控��、調試�、示教���。
8、支持單點定位移動��。左側原點,右側原點����,正面原點定位移動。
9�����、支持機器人IO讀寫操作�����,可讀取機器人輸入輸出狀態??蓪懭?��。
10��、支持遠程狀態監控、關節數據監控�����,可讀取機器人每個關節的角度數據�。也可讀取機器人當前的操作模式和電機狀態。
11�、支持多種任務選擇���,可自動切換加工工件�。可自動切換機器人抓手工具�����。
12���、支持VR頭盔視野和操作者電腦界面視野同時顯示。兩者獨立互補影響�。
13、支持VR頭盔場景的手柄交互����,和電腦界面的鼠標交互。兩者獨立互補影響����。
14、▲支持真實示教器編程�,也可虛擬示教器編程。同樣實現虛擬三維本體運行�����。
15、可實現物體的抓取�����、釋放�、搬運��。且物體具有物理屬性���,重力��、彈力���、摩擦力等����。
16、支持手動操作��,自動操作兩種模式���?����?烧{節運動速度�����。
17����、支持場景自由旋轉����、放大��、縮小���、移動���。支持正交���、透視模式���。支持復位示教。
18��、支持機器人碰撞檢測:關節碰撞檢測���、工具碰撞檢測��。當發生碰撞后���,高亮紅色顯示碰撞物體���,并立即切斷機器人電機起到保護作用�����。
19���、▲支持虛擬邊界保護����,當運動范圍超出預設的范圍邊界時����。預設的邊界會高亮紅色顯示���。并立即切斷機器人電機起到保護作用。
20��、支持連續碰撞保護����,或者連續超出邊界保護���。支持復位操作。
21����、支持運動軌跡描繪,可以將機器人運動的軌跡實時記錄并生成三維軌跡線條�����。讓學生更直觀的分析查看機器人運動的軌跡����。支持復位軌跡�����。
22��、▲支持三維示教點位,可以用虛擬示教器示教�����,也可用真實示教器示教。
23�����、支持實訓任務的擴展����。增加實訓加工的工件和工具。
24����、支持外部真實環境保護系統?����?赏饨影踩T���,安全光柵。
25�、▲支持機器人所有的相關指令����,直線���,圓弧���,關節運動等���。
26���、支持TCP示教�,工件坐標系建立等����。
27、支持多種模式:數字孿生監控模式���、半實物仿真實訓模式、虛擬在線調試模式、軟件在環模式���、硬件在環模式等。
28���、虛擬在線調試模式 可以和對應機器人品牌官方離線編程軟件的仿真器實時連接,不需要真實機器人就可以實現程序的在線實時監控����、調試、示教點位。
29�����、虛擬三維對象與虛擬機器人實時互聯互通�,可任意執行機器人的編程動作�。也可任意反饋機器人所需要的的各種傳感器信號、開關量�、模擬量、數字量、脈沖量等輸入信號����。
30����、虛擬調試就是虛擬現實技術在工業領域的應用,通過虛擬技術創建出物理制造環境的數字復制品����,以用于測試和驗證產品設計的合理性��。例如��,在計算機上模擬整個生產過程,包括機器人和自動化設備、PLC���、變頻器�����、電機等單元����。像機器人單元模型創建完成就可以在虛擬世界中進行測試和驗證�����。
31�、▲虛擬三維對象實訓任務:軌跡示教含有螺旋線、多邊形���、五角星、曲面圓弧����、曲面三角形、曲面直線等多種空間軌跡線。書寫平臺進行寫字和繪畫練習。碼垛實訓實現多種物料的搬運和疊放�,真實倉庫的碼垛堆放����。圖塊搬運含多種以上的圖塊形狀。實現不同工位的搬運���。模擬焊接工藝,焊接軌跡�����。不同材料的焊接方法等等�����。
32�、支持選配沉浸式VR頭盔連接,漫游場景觀看和交互操作�����。
33�、支持遠程操作機器人。單個關節移動����,線性移動多種模式移動����。
(十三)���、配套常用工具
包含萬用表、電筆���、電工膠布��、尖嘴鉗�、斜口鉗�、活動扳手、剝線鉗����、十字螺絲刀、一字螺絲刀����、內六角 1 套�、工具箱等�。
四�、實訓項目
1、機械裝調實訓項目:
(1)主軸運輸軸的裝調實訓
(2)氣動工作臺的裝調實訓
(3)供料轉盤的裝調實訓
(4)搬運裝料臺的裝調實訓
(5)加工裝置的裝調實訓
(6)裝配裝置的裝調實訓
(7)六自由度機器人的裝調實訓
(8)倉儲機構的裝調實訓
2����、電氣接線實訓項目:
(1)傳送軸主電路的接線實訓
(2)供料轉盤主電路的接線實訓
(3)變頻器控制的接線實訓
(4)機器人控制的接線實訓
(5)倉儲步進系統的接線實訓
3��、軟件編程實訓項目:
(1)基本編程指令及編程軟件的應用
(2)氣動元件基本應用及調試方法
(3)PLC 步進電機正反轉和轉速控制
(4)變頻器的程序運行及多段速度運行
(5)觸摸屏編程應用
(6)PLC 總線通訊數據通信技術
(7)機器人編程實訓技術
(8)機器人碼垛應用實訓
(9)3D 軟件在線控制應用實訓
4、液壓與氣動實驗
五�����、主要硬件配置清單(單臺套)
| 序號 | 名稱 | 型號及規格 | 單位 | 數量 |
| 1 | 供料單元 | >75×78×110cm | 套 | 1 |
| 2 | 加工單元 | >75×78×110cm | 套 | 1 |
| 3 | 搬運單元 | >75×78×110cm | 套 | 1 |
| 4 | 裝配單元 | >75×78×110cm | 套 | 1 |
| 5 | 機器人搬運單元 | >75×78×110cm | 套 | 1 |
| 6 | 倉儲單元 | >75×78×110cm | 套 | 1 |
| 7 | 運輸單元 |
| 套 | 1 |
| 8 | 觸摸屏監控單元 |
| 套 | 1 |
| 9 | 配套常用工具 |
| 套 | 1 |
| 10 | 靜音氣泵 | >500W | 套 | 1 |
| 11 | 機器人3D仿真軟件 |
| 套 | 1 |
| 12 | 自動化生產線3D仿真軟件 |
| 套 | 1 |
| 13 | PLC3D仿真軟件 |
| 套 | 1 |
| 14 | 鋁合金電腦推車 | 電腦用戶自備 | 套 | 1 |