")
一���、產品概述
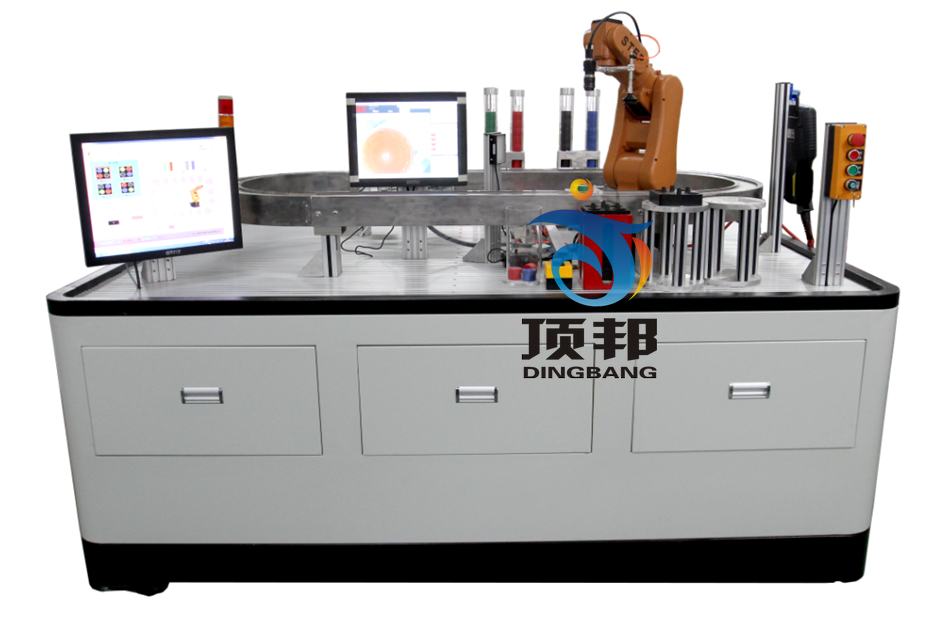
工業機器人與智能視覺系統應用實訓平臺以工業機器人與機器視覺為核心,將機械�����、氣動、運動控制����、變頻調速���、編碼器技術����、PLC控制技術有機地進行整合���,結構模塊化,便于組合����,實現對高速傳輸線上的不同物料進行快速的檢測、組裝����。為了方便實訓教學,系統進行了專門的設計�����,可以完成各類機器人單項訓練和綜合性項目訓練�,可完成各類機器人單項訓練和綜合性項目訓練�。可以進行六軸機器人示教���、定位�����、抓取、裝配等訓練�,
包含六自由度工業機器人、智能視覺檢測系統�����、PLC控制系統及一套供料���、輸送、裝配��、倉儲機構���,可以實現對高速傳輸的工件進行分揀��、檢測���、搬運、裝配����、存儲等操作。
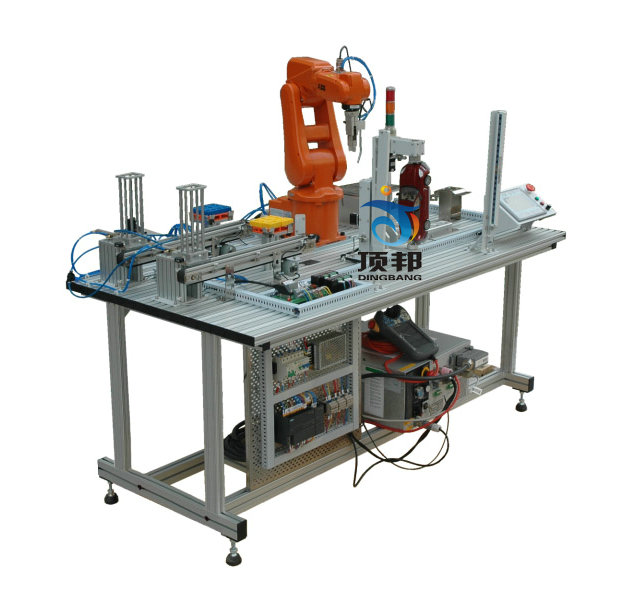
該平臺各組件均安裝在型材桌面上�,機械結構��、電氣控制回路��、執行機構相對獨立����,采用工業標準件設計。通過此平臺可以進行機械組裝���、電氣線路設計與接線、PLC編程與調試��、智能視覺流程編輯、工業機器人編程與調試應用等多方面訓練�����,適合職業院校��、技工學校自動化類相關專業《工業機器人與控制技術》、《自動化技術》等課程的實訓教學�����,適合自動化技術人員進行工程訓練及技能比賽����。
二、技術性能
1. 輸入電源:單相三線~220V±10% 50Hz
2. 工作環境:溫度-10℃~+40℃ 相對濕度≤85%(25℃) 海拔<4000m
3. 裝置容量:<1.5kVA
4. 實訓平臺尺寸:2200mm×1200mm×1500mm
5. 安全保護:具有漏電保護���,安全符合國家標準
三、設備結構與組成
該實訓平臺由STEP SD500型六自由度工業機器人系統���、歐姆龍智能視覺檢測系統����、可編程控制器(PLC)系統、四工位供料單元�、環形輸送單元�、工件存儲盒供料單元、工件組裝單元���、倉庫單元�����、廢品回收桶、各類工件��、型材實訓桌���、型材電腦桌等組成��。
1. 新時達STEP SD500型六自由度工業機器人系統
由機器人本體����、機器人控制器���、示教單元�、輸入輸出信號轉換器和抓取機構組成��,裝備吸盤����、視覺攝像頭等�,可對工件進行吸取�、搬運、裝配�、測量、拆解等操作��,也可以根據智能視覺相機識別不同顏色對工件裝配��。
1) 機器人本體由六自由度關節組成��,固定在型材實訓桌上�����,具有6個自由度�,串聯關節型工業機器人安裝方式包括地面安裝�、掛裝、倒裝
2) 第1軸工作范圍為+170°/-170°���,最大旋轉速度370°/s
3) 第2軸工作范圍為+110°/-110°��,最大旋轉速度370°/s
4) 第3軸工作范圍為+40°/-220°��,最大旋轉速度430°/s
5) 第4軸工作范圍為+185°/-185°,最大旋轉速度300°/s
6) 第5軸工作范圍為+125°/-125°�����,最大旋轉速度460°/s
7) 第6軸工作范圍為+360°/-360°���,最大旋轉速度600
8) 最大的工作半徑為500mm
9) 有效負載5kg
10) 機器人示教單元有液晶顯示屏��、使能按鈕、急停按鈕��、操作鍵盤���,用于參數設置���、手動示教�、位置編輯�、程序編輯等操作�。
2. 歐姆龍智能視覺檢測系統
配備一套歐姆龍FZ5-L350智能視覺系統,由視覺控制器�、白色光源、視覺相機及監視顯示器等組成�����。用于檢測工件的特性����,如數字�����、顏色�、形狀等��,還可以對裝配效果進行實時檢測操作�����。通過I/O電纜連接到PLC或機器人控制器��,也支持串行總線和以太網總線連接到PLC或機器人控制器����,對檢測結果和檢測數據進行傳輸。
3. 西門子可編程控制器單元
配備西門子S7-1200可編程控制器�,自帶以太網通訊模塊����、數字量擴展模塊控制機器人、電機�����、氣缸等執行機構動作�,處理各單元檢測信號,管理工作流程���、數據傳輸等任務。
6. 四工位供料單元
由移動井式料庫����、推料氣缸����、無桿氣缸和光電傳感器組成,安裝在型材實訓桌上�,用于將工件庫中的工件依次推出到環形輸送線����。提供不同顏色的標準工件,雜色疊加等不合格工件�����。多工位的供料設計�,使得供料方式多樣化,可以進行單一的上料���,也可以進行不同顏色的組合上料��,以及對上料速度進行控制�����,實現上料形式的多樣化。
7. 環形輸送單元
包含一套交流調速系統�����,由三菱D720變頻器�����、三相交流電機���、環形板鏈(傳送帶)、光纖傳感器等組成�����,安裝在型材實訓桌上����,用于傳輸工件����。
8. 工件存儲盒供料單元
包含一套步進電機推桿、DM556步進驅動��、料盒存儲槽等組成,安裝在型材實訓桌上��,當一個工件存儲盒被取走會自動退出下一個工件存儲盒�,用于工件存儲盒自動供料�。
9. 工件組裝單元
由工件存儲盒托盤及型材立柱組成,安裝在型材實訓桌上��,用于裝配工件����。工件盒內設有4個工件槽用于放置工件,機器人可以根據不同配方按照上位機設定顏色進行放置工件�。
10. 倉庫單元
由工件存儲盒托盤及型材立柱組成�����,安裝在型材實訓桌上����,機器人用于放置裝配完的組件進行堆垛,也可以通過機器人對裝配完成的組件進行拆垛����。
11. 廢品回收桶
安裝在型材實訓桌左后側���,用于機器人自動放置被檢測出來的無用工件或不合格品�����。
12. 以太網路由器
以太網路由器將PLC���、機器人控制器、智能視覺控制器組成一個以太網局域網����,進行數據的相互傳輸����,實現工業現場控制系統的高層次應用,同時可以培養和考核學生對工業網絡的使用技能���。
四�����、軟件介紹
1. 機器人調試編程軟件
本設備使用機器人專用調試編程軟件��,可以對機器人進行編程和調試�。該軟件具有文本編輯區����、位置列表區、屬性指示區����、項目管理區等窗口,可以對機器人進行調試���。調試時可對機器人進行如下操作:程序編輯、伺服開和關��、運行速度設置�、各關節位置給定、運行和停止���、單步執行指令��、連續執行指令、程序跳轉執行等��。同時該軟件提供底層驅動接口函數����,可供用戶進行二次開發使用及進行深層次機器人控制技術的研究。
2. 工件裝配流程編輯軟件
提供一個本設備專用的工件裝配流程編輯軟件���,通過PLC下載口與PLC進行數據傳輸,可以將工件的裝配流程進行隨意編輯�,并下發給PLC。每組的三個工件盒���,每個工件盒的四個工位都可以設置成需要的工件��,可選編號����、顏色�、高度�,不同位置可選相同工件。軟件配合PLC和機器人程序��,實現工件裝配流程的多樣化�。
五�、配置清單
| 序號 | 名稱 | 主要部件�����、器件及規格 | 數量 | 備注 |
| 1. | 實訓平臺 | 2000mm×1200mm×1400mm | 1臺 |
|
| 2. | 工業機器人 | 6軸工業機器人本體:SD500 | 1臺 | 新時達 |
| 機器人控制器:SRC3.1 | 1套 |
| 3. | 智能視覺系統 | 視覺控制器:FZ5-L350 | 1臺 | 歐姆龍 |
| 視覺相機:ZFX-SC10 | 1臺 |
| 4. | 可編程控制器系統 | PLC主機:S7-1200 CPU 1215C AC/DC/繼電器 | 1只 | 西門子 |
| 數字量輸出模塊:SB1222 4輸出 | 1只 |
| 5. | 交流調速系統 | 變頻器:FR-D720S-0.4kW | 1套 |
|
| 交流減速電機 |
| 6. | 步進系統 | 步進驅動器DM556 | 1套 |
|
| 步進電機:42BYG |
| 7. | 路由器 | 4P以太網路由器 | 1臺 |
|
| 8. | 實訓模塊 | 四工位供料單元����、環形輸送單元、工件存儲盒供料單元�、工件組裝單元、倉庫單元等 | 1套 |
|
| 9. | 氣泵 | 靜音氣泵 | 1臺 |
|
| 10. | 電腦 | H81主板 雙核G1840處理器 2G內存 500G硬盤集顯19.5寸顯示器 | 1臺 |
|
六�、實訓項目
1. 機器視覺系統的原理���、使用和調試
2. 六軸工業機器人系統的原理��、使用和調試
3. 六軸工業機器人坐標系統和機器視覺坐標系統標定及相互轉換
4. 工業機器人與機器視覺系統綜合應用的安裝與調試
5. 機器視覺系統模板設置、編程與調試
6. 通過示教單元手動調試工業機器人
7. 通過示教單元設置���、修改各控制點坐標
8. 通過示教單元編寫��、修改工業機器人程序
9. 機器人追蹤坐標整定
10. 工業機器人系統的軟件二次開發編程
11.智能視覺圖像輸入編輯與調試
12.智能視覺結果給出編輯與調試
13.智能視覺顏色比對測量
14.智能視覺編號比對測量
15.智能視覺尺寸比對測量
16.智能視覺角度測量
17. 智能視覺系統與工業機器人綜合應用
18.PLC程序編程與調試
19.智能視覺系統與工業機器人綜合應用